

Persons in the vicinity of laser sources must be protected from the dangerous radiation. But protective walls or barriers are often associated with great expense. With the virtual laser area developed by Cloos, users reduce these efforts to a minimum and reliably protect employees from the sensor’s laser beam.
© Cloos
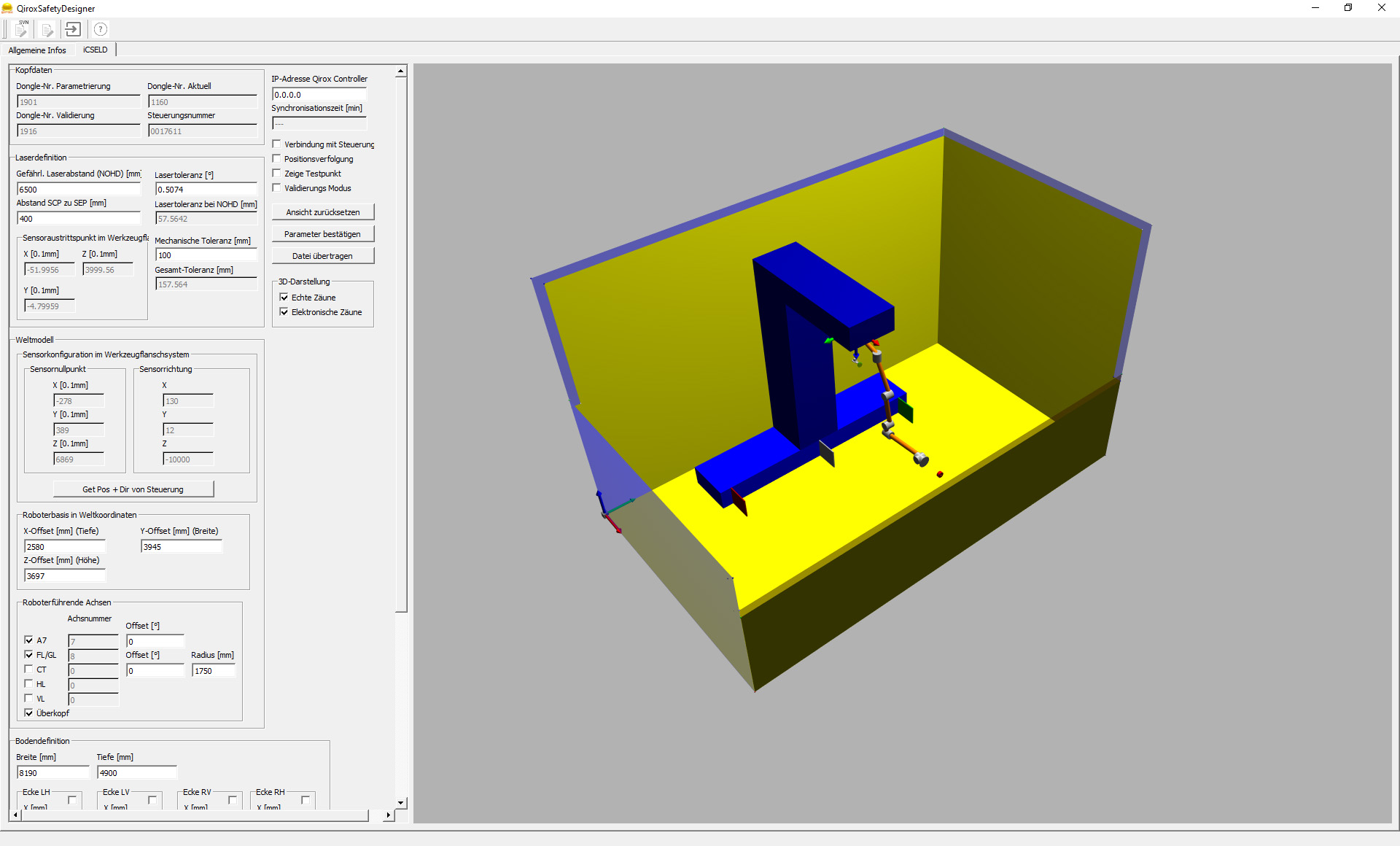
The position and beam direction of the laser sensor is known to the robot controller. A 3D model (virtual laser area) defining the robot system environment with its requirements is linked to this information. As long as the laser beam hits parts, plant components, safety equipment or hall walls of the virtual laser area, there is no danger to persons.
If the beam does not point to any area programmed in the laser area, it cannot be activated and the sequence program continues without the laser beam. As soon as the robot reaches a position where there is no longer any danger to persons from the laser beam, the controller releases the laser again and the search routines take place as specified in the program. The virtual laser area is active in the automatic sequence and protects the people around the system.
Qirox LaserZoneDesigner is PC software that allows programming and modification of a laser zone defined on the robot system layout. The initial programming of the laser area is included in the scope of delivery of the robot system and is defined during commissioning. Qirox LaserZoneDesigner provides a self-explanatory graphical interface. Checking and displaying the laser area can also be done by the user.
Web:
www.cloos.de


